- 產品
- 供應
- 公司
- 新聞
|
|
||||||||||||||||||||||||||||
6ES7193-4CB30-0AA0
SIEMENS上海朕鋅電氣設備有限公司
手機 15021699383(萬女士)
微信W15107475458
電話 021-31668149
公司 網址 http://zhenxindianqi.cn/
Q Q 2779823058
傳真 021-67226033
西門子產品是自動化最好的產品 我們西門子產品銷售全球
西門子是我們的交噶 我為西門子代言 價格優 產品好 質量保證
本公司代理系列如下
CPU PLC模塊(西門子代理)專業銷售西門子S7/200/300/400/1200/1500PLC/變頻器/人機界面/觸摸屏/西門子通訊電纜/現場總線、
西門子電纜 拖纜 網線 DP接頭
【一諾千金誠信交易】【長期銷售、安全穩定】
【稱心滿意、服務動力】【真誠面對、溝通無限】
【質量承諾、客戶滿意】
西門子 知其巧 用其妙
真誠對待您的每一次來電
手機 15021699383(萬女士)QQ 2779823058
價格優品質好保證質量 是一家值得讓您信用 買的省錢
用的安心
就來上海朕鋅電氣設備有限公司 歡迎您前來采購 詢價
1.液壓伺服系統簡介
液壓伺服系統以其響應速度快(相對于機械系統)、負載剛度大、控制功率大等獨特的優點在工業控制中得到了廣泛的應用。而電液伺服系統是通過使用電液伺服閥,將小功率的電信號轉換為大功率的液壓動力,從而實現了一些重型機械設備的伺服控制。
1.1 液壓伺服系統的組成
液壓伺服系統主要由以下幾部分組成(如圖 1):
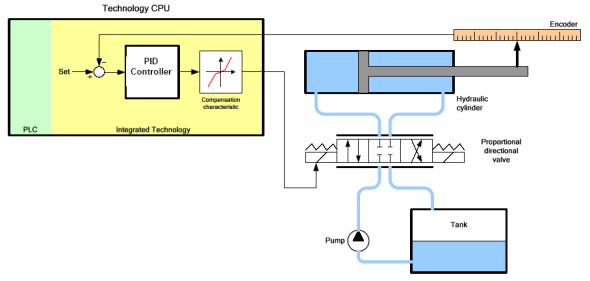
圖1. 液壓伺服系統
使用TCPU控制液壓伺服系統時,TCPU就是該系統中的控制器;TCPU可以通過脈沖或者模擬量輸出來控制比例換向閥的開度和方向從而控制液壓缸的運動方向和速度;測量反饋系統可以由設備編碼器或者模擬量信號通過IM174接口模板或模擬量輸入模板將信號反饋給TCPU。
1.2 液壓伺服系統與電氣伺服系統區別
控制電氣伺服系統時,執行機構(通常為伺服電機)能夠根據速度給定改變運行速度,響應快,動態特性好,給定與輸出之間呈線性比例關系;而液壓伺服系統由其液壓油的物理特性決定了其響應速度和動態特性都較低,而且在液壓伺服系統啟動、停止以及換向時都會出現大滯后性,這樣就導致輸出給定與執行速度之間的關系并不是線形的(如圖 2),這樣,一旦我們還以控制線性電氣軸的模型來控制非線性液壓軸時,速度會非常不穩定,而且位置閉環會不停的修正由速度不穩定所帶來的位置偏差,這時液壓執行機構就會來回跳動或者抖動,造成定位誤差大甚至損壞機械設備。所以我們在控制液壓伺服系統時就應該先了解該系統的給定與輸出之間的關系,確定補償曲線來保證執行機構平穩運行。
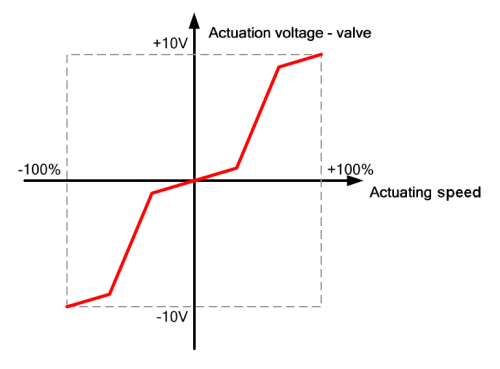
圖 2. 給定與實際速度的關系
在 TCPU 中,補償曲線可以由多種方法來確定,例如 S7T Config 中的 Trace 工具,根據輸出不同的給定值和實際的速度值來確定差補點,將差補點的值以表格的方式添入到 Cam Disk (凸輪盤)中。
本文主要介紹使用自動獲得補償曲線功能塊 FB 520“GetCharacteristics” 和 FB 521“WriteCamData”來確定差補曲線。
2.系統結構及軟硬件要求
2.1 系統結構
本系統的給定和反饋均使用高性能ET200M帶AI/AO模板來實現(如圖 3):
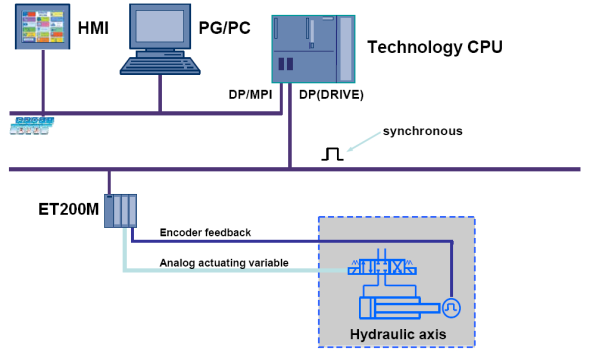
圖 3. 系統結構圖
2.2 硬件及軟件要求
| 名稱 | 數量 | 訂貨號 |
| CPU 315T-2 DP | 1 | 6ES7315-6TG10-0AB0 Or 6ES7315-6TH13-0AB |
| Firmware: V2.6 | ||
| Or CPU 317T-2 DP | 1 | 6ES7317-6TJ10-0AB0 Or 6ES7317-6TK13-0AB0 |
| Firmware: V2.6 | ||
| Micro Memory Card 4MB | 1 | 6ES7953-8LM20-0AA0 |
| Interface module IM174 | 1 | 6ES7174-0AA00-0AA0 |
| Or ET200M / ET200S | 1 | 6ES7 153-2BA02-0XB0 or 6ES7 151-1BA02-0AB0 |
| STEP 7 | 1 | 6ES7810-4CC08-0YA7 Version: V5.4 以上 |
| S7 Technology | 1 | 6ES7864-1CC41-0YX0 Version: V4.1 以上 |
表 1. 硬件及軟件要求
3.項目配置過程:
3.1 硬件組態
在 SIMATIC 管理器中創建新的項目并添加一個 SIMATIC 300 站點。根據實際硬件配置硬件組態,本例中使用模擬量輸入輸出作為給定和反饋信號。組態模擬量輸入輸出并分配 I/O 地址(圖 4);
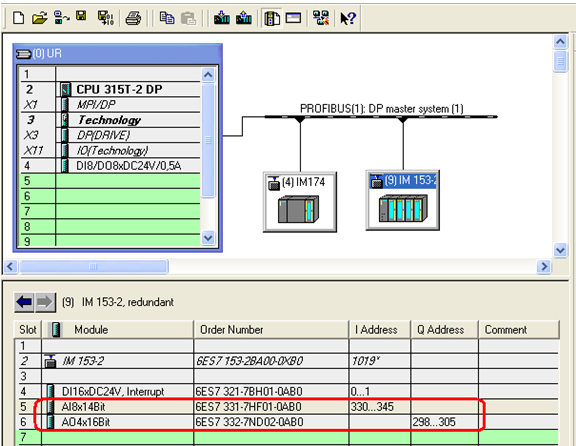
圖 4. 硬件組態
3.2 在 S7T Config 中配置液壓軸
在 S7T Config 的瀏覽器中,雙擊“插入軸”(Insert axis)(圖 5)
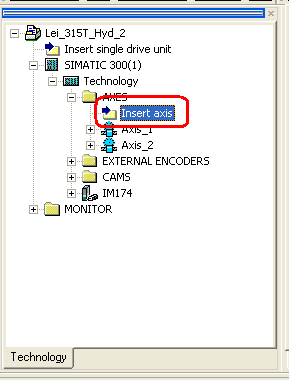
圖 5. 插入液壓軸
在“常規”(General) 選項卡中,選擇“速度控制”(Speed control) 和“定位”(Positioning) 控制然后打開軸向導;
在軸類型話框中,選擇“液壓”(Hydraulic) 軸類型。 將閥類型定義為“Q 閥”(Q valve)(圖 6)。
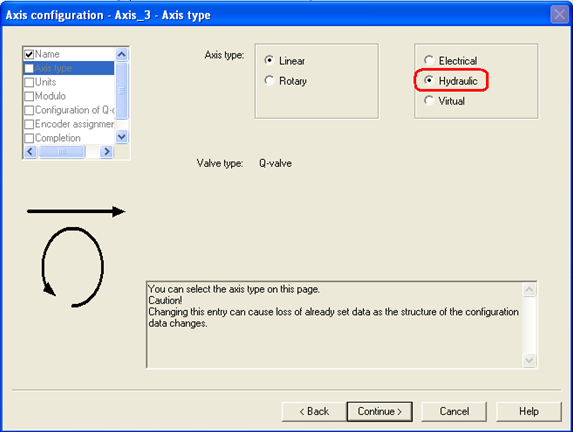
圖 6. 選擇軸的類型
配置完液壓軸的物理單位及模度后,進入到輸入輸出的配置界面,并選擇其輸出方式模擬量輸出模板(圖7 );
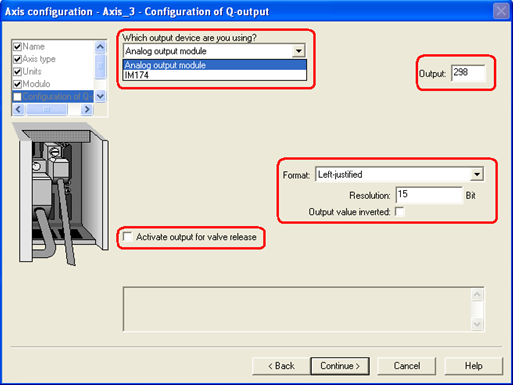
圖 7. 選擇輸出方式
選擇輸出設備為模擬量輸出模塊,填入相應參數:
點擊繼續進入到位置反饋參數界面,填入使用的模擬量輸入的地址(圖 8):
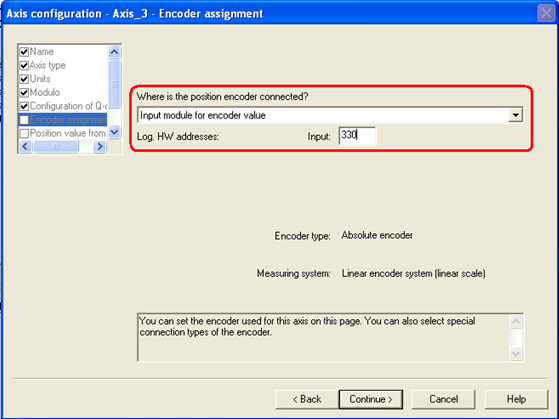
圖 8. 選擇反饋方式
點擊繼續,進入到位置反饋參數分配界面(圖 9):
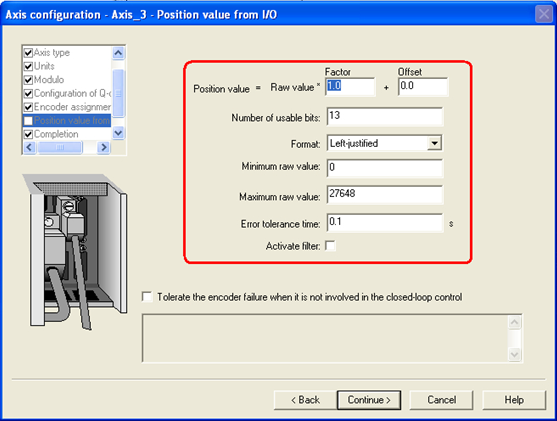
圖 9. 反饋參數分配
相關輸入參數:
分配完所有參數,單擊“完成”(Finish) 退出軸組態對話框。
3.3 建立補償曲線凸輪盤
根據前文所提到的,液壓伺服系統需要確定一條補償曲線來線性化輸出變量與液壓軸速度之間的關系。在 TCPU 中通過使用凸輪盤(Cam Disk)工藝對象來確定補償曲線,液壓伺服軸的補償曲線反映了液壓比例閥輸出給定與液壓軸速度之間的對應關系。由于本文使用功能塊 FB 520 “GetCharacteristics” 和 FB 521“WriteCamData” 來自動獲得補償曲線,所以需要建立兩個凸輪盤(Cam Disk)來確定補償曲線。其中第一個凸輪盤是用來測量、尋找補償點,而測量后的結果會寫入到另外一個凸輪盤,這個被寫入的凸輪盤也就是當前液壓伺服系統的最終補償曲線。
在 CAMS 下面建立兩個凸輪盤,分別取名為:Cam_Profile 與 Cam_Reference,并填入兩個差補點描繪一條輸出給定與執行速度間的參考關系曲線,如圖 10:
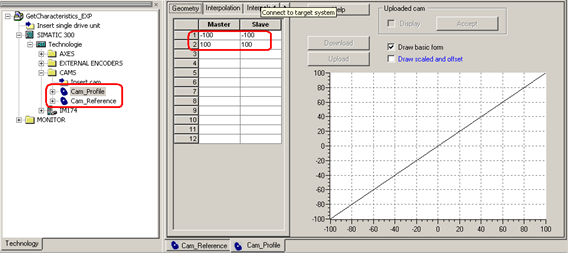
圖 10. 建立補償曲線凸輪盤
做好以上工作后,將 S7T-Config 存盤編譯,并將組態好的軸和凸輪盤等工藝對象生成相應的工藝對象數據塊,并下載到 TCPU。本例中工藝對象數據塊對應為:
4.編寫用戶程序
4.1 使用 FB 520 和 FB 521 自動獲得補償曲線
FB 520 “GetCharacteristics” 和 FB 521“WriteCamData”兩個功能塊并沒有在 S7-Tech 庫中提供,所以需要到以下鏈接下載例子項目,并將項目中的FB520和FB521復制到自己的項目中來。
下載鏈接:27731588
4.2 FB 520 和 FB 521 的功能介紹
4.2.1 FB 520 “GetCharacteristics”
通過該功能塊,系統能夠執行測量并得到當前液壓系統的補償曲線,并將相應的Cam Disk激活為當前液壓系統的Profile。其內部調用結構如圖 11:
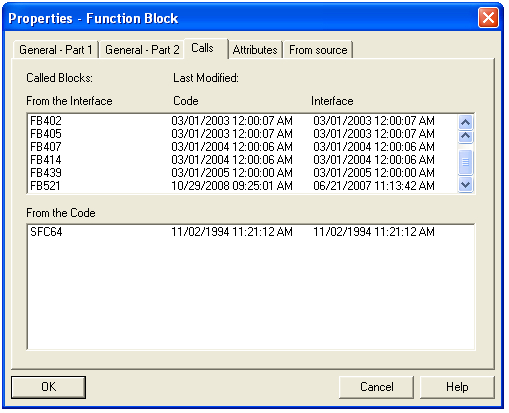
圖 11. FB 520 結構
4.2.2 FB 521 “WriteCamData”
該功能塊能夠將測量的補償曲線寫入到相應的Cam Disk中。其內部調用結構如圖 12:
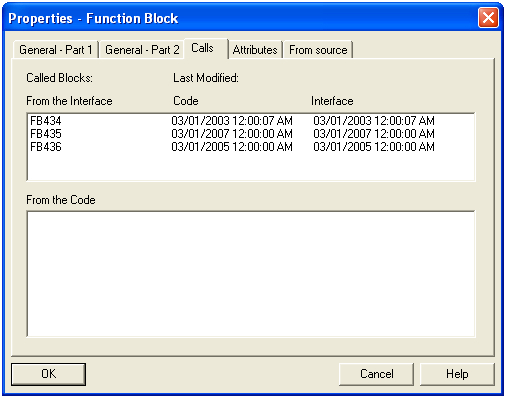
圖 12. FB 521 結構
由這兩個功能塊的結構圖可以看出,其內部調用了很多S7-Tech里面的功能塊,所以需要將這些功能塊復制到當前的項目中來。而且,可以看到在FB520功能塊內部已經調用了FB521,所以只要保證FB 521在項目中存在就可以了,不需要在程序中單獨調用。表 2 為FB520,FB521所使用到的S7-Tech功能塊:
| PLC-Open FB | 功能 |
| FB 402 “MC_Reset” | 復位可能出現的錯誤 |
| FB 405 “MC_Halt” | 停止軸運動 |
| FB 407 “MC_WriteParameter” | 寫系統參數 |
| FB 414 “MC_MoveVelocity” | 使軸運動,并可改變其運行速度 |
| FB 434 “MC_CamClear” | 刪除一個凸輪盤中的所有插補點 |
| FB 435 “MC_CamSectorAdd” | 插入一個新的插補點到凸輪盤中 |
| FB 436 “MC_CamInterpolate” | 修改凸輪盤的插補點 |
| FB 439 “MC_SetCharacteristics” | 激活一個凸輪曲線作為液壓閥的特性曲線 |
表 2. 使用的 S7-Tech 功能塊
4.2.3 FB520的管腳及其定義(圖 13 及表 3):
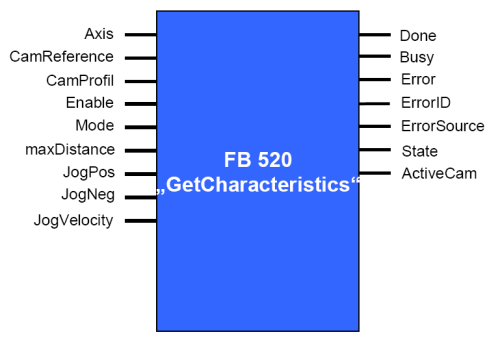
圖 13. FB 520 管腳定義
| 名稱 | 含義 |
| 輸入參數 | |
| Axis | 液壓軸工藝DB號 |
| CamReference | 執行測試時的參考凸輪盤的工藝DB號 |
| CamProfil | 最終要寫入的凸輪盤的工藝DB號 |
| Enable | 使能 |
| Mode | 執行模式 |
| maxDistance | 執行測試時的最大移動距離 |
| JogPos | 正向點動 |
| JogNeg | 負向點動 |
| JogVelocity | 點動速度 |
| 輸出參數 | |
| Done | 測量完成 |
| Busy | 忙 |
| Error | 有錯誤 |
| ErrorID | 錯誤代碼 |
| ErrorSource | 錯誤源 |
| State | 當前狀態 |
| ActiveCam | 當前執行的凸輪盤的工藝DB號 |
表 3. FB 520 管腳定義
4.3 在OB1中調用FB520(圖 14)
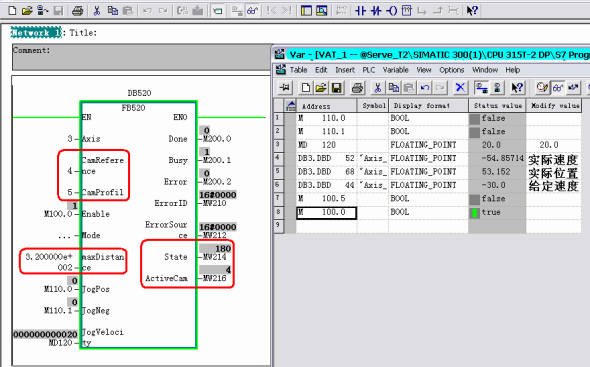
圖 14. 在 OB1 中調用 FB 520
使用步驟:
4.4 FB 520 “GetCharacteristics” 的測量原理(圖 15)
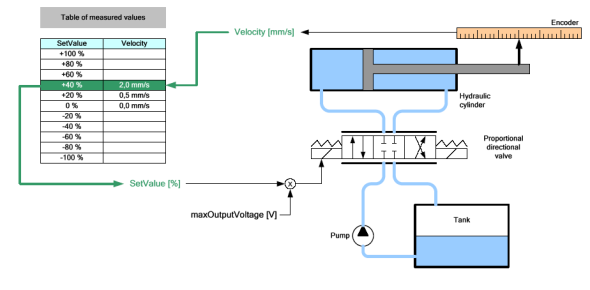
圖 15. FB 520 的測量原理
4.5 FB 520 “GetCharacteristics” 補償曲線的寫入過程(圖 16):
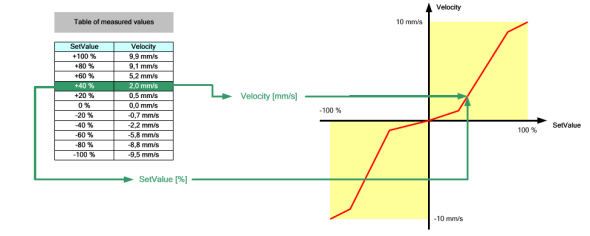
圖 16. 補償曲線的寫入過程
4.6 FB 520 “GetCharacteristics” 執行時的基本步驟
4.7 FB 520 “GetCharacteristics” 的 42 種執行狀態(圖 17):
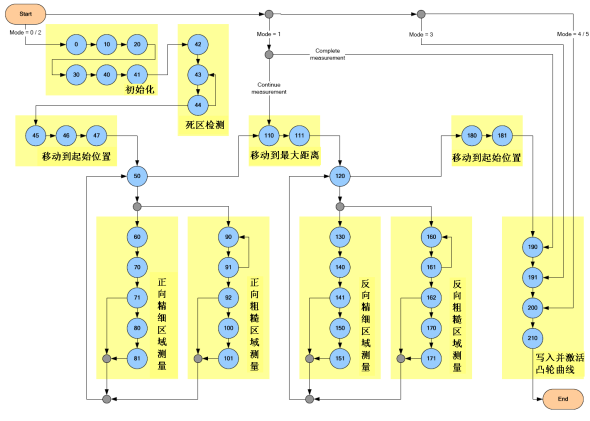
圖 17:FB 520 的42種執行狀態(State)
5.執行結果
在FB520執行自動檢測之后,可以通過在線的方式察看測量出來的補償曲線,如圖 18:
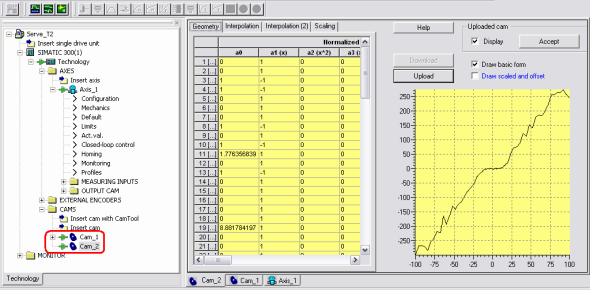
圖 18. 在線察看測量出來的補償曲線
到這里為止,液壓伺服軸的補償曲線已經建立,在 TCPU 中就可以使用其定位功能塊對液壓軸進行控制了,控制器會自動使用補償曲線中的速度對應關系調節輸出。有關更多液壓軸的使用請參考 TCPU 手冊
1 系統概述
MASTERDIVE 家族的6SE70系列變頻器包含VC和 MC兩種變頻器。
MC 專門應用于運動控制系統,廣泛應用于精加工行業:車床,印刷,紡織,機械加工等。
使用MC控制器可實現如下功能:
•® 速度控制
•® 位置控制
•® 裝置之間的角同步控制
MC中包含模塊化的軟件設計:
•® 強大的自由功能塊(包含基本定位功能)
•® 工藝軟件包F01
MC系統的功率部分與VC的功率部分相同,按照不同裝置結構可劃分為(見圖1):

圖1
其中增強書本型裝置,控制板與功率元件為一體,以得到更加緊湊的結構,而書本型裝置和裝機裝柜型裝置則擁有獨立的電子箱,控制板可以插拔,方便更換。更換書本型或裝機裝柜型裝置的控制板后,操作如下:

圖2
2 編碼器的使用
MC要實現定位控制,需要使用編碼器作為速度和位置的反饋信號。
編碼器在安裝使用上分為電機編碼器,外部編碼器。二者可以同時使用,也可以單獨使用。
電機編碼器,安裝在電機軸上,可以測量電機的轉速以及電機的位置,同時可以通過機械設備的變比關系,反映出機械設備的位置。
外部編碼器,安裝在機械設備上,用于檢測設備的位置,可以更準確地反映最終機械設備的位置。
電機編碼器需要將編碼器板裝在C槽。
可以使用的編碼器類型,以及編碼器接口模板如圖3所示
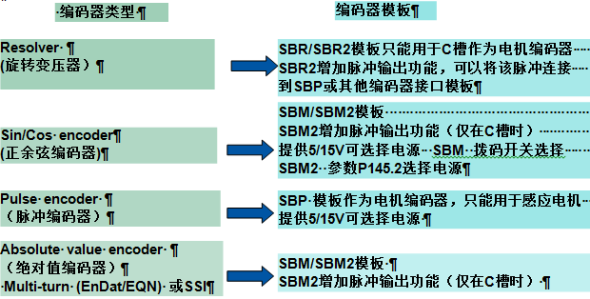
圖3
3 電機類型
MC控制器可以驅動同步電機,異步電機, 類型通過P095進行選擇。(圖4)

圖4
注意:
在使用永磁同步電機時,需要注意轉子零點的問題。
西門子標準同步伺服電機在出廠時,已經保證編碼器的零點與轉子零點對應,此時需要保證動力電纜的相序U,V,W與變頻器的輸出相序相同。
對于沒有確定轉子極位置的同步電機,或者用戶自己更換了編碼器,需要進行轉子零點的校正,否則會導致電機失控。
4 系統設定
擴展模塊 訂貨號
數字量擴展模塊
LOGO! DM 8 12/24R 6ED1 055 - 1MB00 - 0BA1
LOGO! DM 8 24 6ED1 055 - 1CB00 - 0BA0
LOGO! DM 8 24R 6ED1 055 - 1HB00 - 0BA0
LOGO! DM 8 230R 6ED1 055 - 1FB00 - 0BA1
LOGO! DM 16 24 6ED1 055 - 1CB10 - 0BA0
LOGO! DM 16 24R 6ED1 055 - 1NB10 - 0BA0
LOGO! DM 16 230R 6ED1 055 - 1FB10 - 0BA0
模擬量擴展模塊
LOGO! AM 2 6ED1 055 - 1MA00 - 0BA0
LOGO! AM 2 PT100 6ED1 055 - 1MD00 - 0BA0
LOGO! AM 2 AQ 6ED1 055 - 1MM00 - 0BA1
技術數據?
通訊擴展模塊 訂貨號
CM EIB/KNX 6BK1700 - 0BA00 - 0AA1
CM AS 接口 3RK1400 - 0CE10 - 0AA2
技術數據?
文本顯示模塊 6ED1055-4MH00-0BA0
LOGO! TD
技術數據?
注: *:也帶模擬輸入
附件 訂貨號
軟件 更多…
B64?C63? LOGO! B64Soft Comfort C63 6ED1 058 - 0BA02 - 0YA0
升級到LOGO! Soft Comfort V6.0 6ED1 058 - 0CA02 - 0YE0
存儲卡 更多…
? C65 6ED1 056 - 1DA00 - 0BA0
電池卡 更多…
? LOGO! 電池卡 6ED1 056 - 6XA00 - 0BA0
存儲器電池卡 更多…
LOGO! 存儲器電池卡 6ED1 056 - 7DA00 - 0BA0
開關模塊 更多…
LOGO! Contact 24 V 6ED1 057 - 4CA00 - 0AA0
??? LOGO! Contact 230 V 6ED1 057 - 4EA00 - 0AA0
電源模塊 更多…
LOGO! Power 12V/1.9A 6EP1 321 - 1SH02
??? LOGO! Power 12V/4.5A 6EP1 322 - 1SH02
? LOGO! Power 24V/1.3A 6EP1 331 - 1SH02
LOGO! Power 24V/2.5A 6EP1 332 - 1SH42
?? LOGO! Power 24V/4A 6EP1 332 - 1SH51
? LOGO! Power 5V/3A 6EP1 311 - 1SH02
?? LOGO! Power 5V/6.3A 6EP1 311 - 1SH12
LOGO! Power 15V/1.9A 6EP1 351 - 1SH02
? LOGO! Power 15V/4A 6EP1 352 - 1SH02
其他 更多…
串口/PC電纜 6ED1 057 - 1AA00 - 0BA0
USB/PC電纜 6ED1 057 - 1AA01-0BA0
調制解調器電纜 6ED1 057 - 1CA00 - 0BA0
英文手冊 6ED1 050 - 1AA00 – 0BE序號 定貨號 注釋
工業計算機
機架式PC
1 6ES7 643-8HG23-0XX0 RACK PC847B
6ES5095-8MA05
6ES5951-7LB21
西門子PCS7系統代理銷售
序號 定貨號 型號
CPU
1 6ES7211-0AA23-0XB0 CPU221 DC/DC/DC,6輸入/4輸出
2 6ES7211-0BA23-0XB0 CPU221 繼電器輸出,6輸入/4輸出
3 6ES7212-1AB23-0XB8 CPU222 DC/DC/DC,8輸入/6輸出
4 6ES7212-1BB23-0XB8 CPU222 繼電器輸出,8輸入/6輸出
5 6ES7214-1AD23-0XB8 CPU224 DC/DC/DC,14輸入/10輸出
6 6ES7214-1BD23-0XB8 CPU224 繼電器輸出,14輸入/10輸出
7 6ES7214-2AD23-0XB8 CPU224XP DC/DC/DC,14DI/10DO,2AI/1AO
8 6ES7214-2BD23-0XB8





