- 產品
- 供應
- 公司
- 新聞
|
|
||||||||||||||||||||||||||||
北京深隆科技有限公司的主要產品及服務為機器人智能涂裝線、工業機器人應用及成套裝備、涂裝自動化生產線集成三大系列,以解放低端勞動力、改善有害工作環境為導向,以工業機器人集成應用為基礎,以行業應用的個性化方案定制為核心,業務領域包括3C產品、汽車零部件等表面處理、重工、軍工、航空、新能源等行業。產品包括:工業機器人噴涂生產線,自動涂裝生產線,全自動點涂膠機器人, 自動上下料機器人 自動玻璃點涂膠機器人,自動鎖鏍絲機器人,自動上下料機器人、 CCD視覺定位鎖鏍絲機,工業機器人配件-機器人工裝,夾具,氣動夾具,氣動工裝,氣動模具,裝配夾具,裝配卡具等。技術咨詢:18001130868 18001197956
越來越多的總裝車間用機器人工作
在汽車制造工廠,需要在總裝車間完成前、后風擋玻璃的涂膠及裝配工序,而裝配品質由涂膠質量及安裝質量共同決定,涂膠及裝配質量不僅影響整車的降噪、防漏水品質,還直接影響用戶對整車的感覺,所以越來越多的總裝車間采用機器人完成涂膠及裝配工作。

風擋玻璃的安裝一般在內飾裝配線中完成,傳統的風擋玻璃裝配工藝一般由人工或機器人進行涂膠,人工或助力機械臂輸助安裝, 而高速機器人玻璃涂膠安裝工作站,能提高生產工藝的自動化程度;較傳統的人工玻璃安裝工藝至少可以提高20%的節拍,降低工人的勞動強度;提高涂膠及裝配質量;還可以節約10%的原料,能夠保證膠型控制精度為±0.5mm。安裝精度在±0.8 mm,保證了風擋玻璃裝配質量的穩定性。

工藝流程
風擋玻璃自動涂膠及裝配的工藝流程為:人工上件→自動清洗→自動底涂→晾干→自動涂膠→自動安裝。清洗、底涂、涂膠、裝配工藝均可以實現無人化操作。全自動清洗及底涂工藝利用清洗劑自動供液系統及機器人共同實現。
設備主要包含中臺、機器人、清洗裝置、底涂裝置、玻璃庫區、輸送線等。考慮成本及生產節拍,清洗與底涂可考慮采用同一臺機器人。
底涂液的原料一般是聚異氰酸酯,有一定毒性,所以有條件的車間可以考慮增加一套抽風設備,防止揮發氣體的傷害。底涂完成后,需要進行晾干,大約需要2-5min,玻璃的涂膠及安裝必須在15min內完成,否則玻璃膠會固化失效,造成與車身無法粘貼。

清洗裝置由清洗劑存儲及供液裝置、輸送系統、檢測系統和控制系統等構成。清洗采用固定式,清洗劑靠供液及輸送系統輸送至清洗嘴,機器人根據玻璃信息按相應的軌跡進行清洗,同時,安裝在清洗嘴處的檢測裝置可實現對清洗軌跡、清洗質量的實時監測,一旦漏洗或偏離軌跡,則進行報警且機器人停止。清洗之后,機器人自動切換到底涂裝置處,按照相應的軌跡進行底涂。
底涂裝置同樣采用固定式,主要是供液裝置、輸送系統、控制系統、檢測和底涂頭等組成。底涂頭處同樣可設置檢測裝置,對底涂效果進行檢測,檢測范同包括但不限于底涂的寬度,均勻性、是否有漏底現象等,由于底涂液具有極強的揮發性能,因此底涂供液及輸送裝置需要有可靠的密封性。 底涂頭需要進行定期更換,以保證底涂效果。
機器人自動涂膠設備主要包含機器人、對中臺、固定式旋轉涂膠槍、涂膠泵、輸送系統、控制系統、檢測裝置、清洗裝置等,考慮生產節拍的要求,涂膠機器人與底涂機器人是互相獨立的。涂膠泵、加熱裝置、輸送系統等裝置可以根據采用的玻璃膠特性或工藝特性設定0-65℃的加熱和保溫控制,從而更好地配合底涂提高粘性性能。涂膠泵采用定量給料系統,利用伺服電機及快速響應離合器控制出膠速度,出口流量可以達到30L/min;涂膠泵同樣可以采用齒輪泵形式,也可是滿足涂膠需求。
機器人自動涂膠的原理與底涂原理類似,機器人根據對中臺反饋的玻璃信息,匹配相應的涂膠軌跡;機器人與工位PLC同進行聯鎖,得到生產計劃發來的信息,也可設置防錯功能,同樣,膠槍處設置膠型檢測裝置,保證膠型滿足工藝要求尺寸,且使機器人涂膠精度能夠控制在±0.5mm以內,能夠對轉彎及接口的膠軌跡進行更有序的控制。通過對供膠參數的調節,亦可滿足不同車型的混線生產,實現涂膠柔性化。

自動安裝工藝是利用視覺引導系統識別車身的空間位置,控制機器人對玻璃進行裝配。設備主要包含視覺引導系統、控制系統、機器人、定位裝置等,此工位的特殊要求為車身需進行定位且處于靜止狀態,所以此工位處的車身輸送線為間歇業式運行。
自動安裝的主要工藝流程為車身輸送到位→定位裝置進行定位→視覺拍照車身→視覺引導機器入安裝。
由于每次車身輸送的位置、玻璃抓取的精度都不一樣,所以自動安裝工藝的難點在于如何保證最終的安裝精度,采用一套由多攝像頭組成的視覺系統,分別對車身狀態及破璃狀態進行確認 ,計算出車身的工件坐標系,同時設置不同車型允許的拍攝、安裝誤差,在誤差范田內可引導機器人進行安裝,最終安裝精度能夠維持在設定的偏差范圍之內。
考慮成本問題,結合節拍的計算,涂膠及安裝可以共用一個機器入完成,即玻璃涂膠完成后立即進行拍照安裝,提高設備的綜合利用率, 在正式投產之前,調試需要大量的數據進行驗證,要針對不同車型,選取車身上最佳的視覺拍照特征點.拍照偏差必須保證在設置值范田內。
下面我們用一個具體的案例來分析整套機器人涂膠裝配方案:
1 客戶需求(以下參數僅作參考)
1.1車型要求
六種車型混流
1.2風窗玻璃技術參數
前、后風擋玻璃及三角窗玻璃
1.3涂膠質量要求
風窗玻璃裝配后膠形尺寸及公差(非膠槍涂膠膠道參數)
膠縫寬度:12 +6/-3
膠縫高度:4mm
1.4風窗玻璃膠規格及性能

1.5 生產綱領和節拍要求:
全年工作251天、雙班制;生產最高節拍68JPH,產能20萬輛/年。
1.6 工藝流程:
人工從工位器具借助助力機械手抓取玻璃→人工從抓取器上翻轉正面向下安裝密封條→清潔及涂覆玻璃底膠→在抓取器上底涂表干→將抓取器上的玻璃放置到輸送滑軌上→輸送滑軌將玻璃輸送到機器人抓取位置處→對中裝置對中→機器人接收工作站信號→機器人抓取玻璃到固定膠槍處涂膠→膠形檢測(如不符合要求,輸送到廢料小車)→符合膠形要求,安裝玻璃。
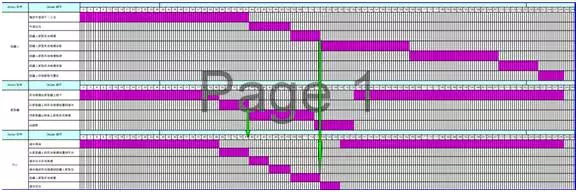
1.7 設計布局圖:
1.8節拍分析:
1.9 現場工況:
環境溫度 -5℃-45℃
濕度:年平均相對濕度:~59%,最高月平均相對濕度:95%(+25℃)
電源:三相五線制交流 380V+15%,-10% 50 Hz±2%
壓縮空氣:0.4~0.8Mpa
2 設備清單

2.1機器人的選擇
因風擋玻璃重量約25kg,抓具重量約40kg,加上線纜等負載總需求在80kg;機器人布置在線邊,需要的在涂膠槍處涂膠,也需要安裝玻璃,經過模擬,臂展2.8M機器人可以滿足。機器人需要與PLC通訊,現在一般主流的通訊方式為Profinet,方便現場組態。機器人使用搬運線纜包,里面含氣路和信號線。

2.2機器人抓具

![]()
機器人抓具含真空吸盤,主要用于吸住玻璃,并安裝仿形的支撐塊,抓具與機器人連接處安裝力傳感器,防止安裝玻璃時過壓而壓碎玻璃。另外有些抓具還帶有整形工裝,在安裝玻璃后進行加壓整形。
2.3助力機械手

助力機械手配備斷氣保護裝置和手動卸載裝置,當總氣源意外斷氣時,主機臂桿不會突然墜落,夾具不會松開,當工人將前擋風玻璃移動到安全位置時,可操作卸載按鈕,將前擋風玻璃安全放下。
懸掛系統采用空載平衡 / 負載平衡自動切換控制方式;當工件被有效夾持后,系統由空載平衡狀態自動切換為預先設定的負載平衡狀態,要求設置狀態指示燈;機械手在行程內任何位置均處于浮動狀態,操作者可輕松用手拉動機械手上下移動,實現工件的定位。同時要求機械臂配安全閥誤操作保護裝置,只有當玻璃被放置到位,按松開按鈕,工件才可被卸載,保障作業安全。
2.4玻璃輸送對中裝置![]()

因底涂完成后,輸送線通過翻轉機構自動將底膠涂抹完畢的玻璃翻轉輸送至熱風烘干位置處(玻璃凸面向上),熱風烘干范圍能夠滿足玻璃邊緣所有底膠涂抹的位置,自下向上對玻璃進行烘干處理。因需要晾干2-5min,對于高節拍生產線,一般玻璃輸送線上設置幾個緩存工位。玻璃輸送到機器人抓取工位后,對中臺對玻璃進行對中定位,整個流程中的對中定位精度要求為±0.15mm。對中裝置由6個聚氨酯滾輪組成,防止碰傷玻璃。
2.5三角窗轉臺定位夾具![]()

三角窗采用人工上件,每套夾具可以放置一對三角窗,轉臺旋轉切換工作位置。
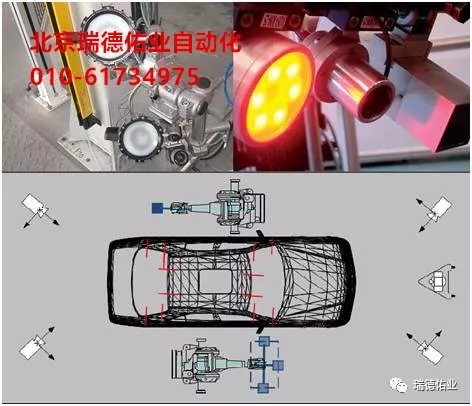
2.6視覺定位系統
![]()
PLC把車型信息傳輸到視覺系統,車身定位于工作位置后,立即喚醒計算測量,所有攝像頭進行圖像采集,特征點識別,利用在圖像中找到的標記點位置和攝像頭的定標結果,以及車身標記點到絕對位置的車身坐標計算當前車身位置,計算當前車身位置與初始位置的偏差,這就是校正矢量(X,Y,Z,RX,RY,RZ),然后視覺系統把校正矢量傳輸給機器人。整個視覺系統占用時間約1s。當然也有部分方案把機器人視覺系統安裝在機器人抓具上。

![]()
2.7雙泵切換涂膠系統

玻璃膠涂抹采用雙組份固定式供膠設備,玻璃膠與催化劑的配比為50:1,玻璃膠涂抹后的膠型截面為底邊10mm,高12mm等腰三角形,要求膠型控制精度為0到+1mm。同時要求膠形的底邊和高度尺寸可人工設定,用以適應由于產品變更所導致的變化。
供膠設備采用雙桶自動切換的結構形式,即玻璃膠和催化劑的泵機均使用兩桶容器,當第一桶使用完畢后,泵機自動切換使用第二桶。在膠桶容器內設定下限容量,提前報警。同時,當泵機自動切換膠桶使用后,須有信號燈提示操作人員進行膠桶更換。人工進行膠桶更換的作業位置在機器人的動作軌跡之外,且須安全、便利。泵機配備自動和手動排膠口,以便在更換膠桶時排除空氣,避免空氣進入膠管,造成涂膠過程不連續。
膠泵系統具備定量參數設定功能,出膠流量可人工設定,以適應生產節拍的變化;流量控制精度為±1%,以避免涂膠量受膠料溫度、黏度和流動性變化的影響,保證涂膠膠形穩定。當涂膠膠形不滿足設定要求時,必須報警。并將涂膠不合格的玻璃自動放置在廢品輸送小車上,通過人工運走。
膠泵系統具備溫控器參數人工設定功能,設定范圍為45~90°C,采用電加熱,溫度控制精度為±1°C,對短路、斷路、實際溫度、供電電源和保險絲進行自動監控,當出現異常時,必須報警。膠泵系統具備單/雙組分供膠切換功能,可通過開關閥,實現催化劑泵機系統的關閉與開啟,以實現單雙組分膠料的切換,滿足日后產品新增或變更的需求。膠泵系統具備實時顯示涂膠流量、涂膠壓力、加熱溫度以及膠桶剩余容量等信息。
加熱膠管采用特弗龍(PTFE)內管,內置加熱電阻和溫度傳感器,帶絕緣保護層和絕熱層標準接口,便于拆裝,抗壓350Par以上,如果膠管破裂,泵機應自行停止運行并報警。膠泵系統使用的膠槍、管路以及其相關附件須具備單/雙組分玻璃膠通用的功能。且膠泵系統須具備自動清膠功能,用于膠槍槍口自動清理,在停止工作狀態下,膠槍不得出現膠料固化而造成的堵槍現象。
2.8固定膠槍裝置

膠嘴設計成仿形樣式,固定膠槍采用機器人外軸電機驅動,玻璃涂膠轉彎處,外軸與機器人聯動,能保證涂膠軌跡與膠型。固定膠槍處設置膠型檢測視覺系統,在涂膠時檢測膠型及斷膠,但目前這一功能一直用不好,原因是線激光對銳角輪廓捕捉本身有缺陷,可能目前推出的白光測量系統能完美解決這個難題,但成本略高。

2.9 PLC控制系統

設備電氣控制采用可編程序控制器(PLC)及現場總線控制;工作站電控系統應確保駕駛室輸送線可實現全自動及手動調試方式的控制模式;自動模式為無人工干預情況下設備由PLC控制自動運行;手動模式要求設備手動運行時加前后交接設備所需要的聯鎖及其它必要的聯鎖;繼電器、接觸器類產品在設備調試運行后,應至少還備用1個常閉(NO)、1個常開(NC)輔助觸點;
控制電路采用隔離變壓器與動力電路相隔離;控制線路采用線槽或橋架安裝方式。控制電纜留有5%的備用線;行線槽內動力電纜和控制電纜(如:光電開關、接近開關等)分開,保證控制的穩定性和安全性;每個可編程序控制器(PLC)控制系統必須提供1個編程口,1個工業以太網通訊口和1個人機界面接口;
控制程序為結構化程序設計,通過子程序或功能塊間的調用來實現控制系統功能,嚴禁全程線性編程;控制系統需具備狀態監測的功能,能對整個系統的運行狀態進行動態監控;控制柜采用觸摸屏的人機操作界面進行實時監測和相關參數修改。能顯示設備運行狀態和各類故障信息(出現故障時可聲光提示,方便維修)。
控制柜具有以太網絡通訊接口和信息采集功能,遵守OPC協議,能將采集的信息送入OPC接口,并與MES系統及設備組網系統聯合調試。





