- 產品
- 供應
- 公司
- 新聞
|
|
||||||||||||||||||||||||||||
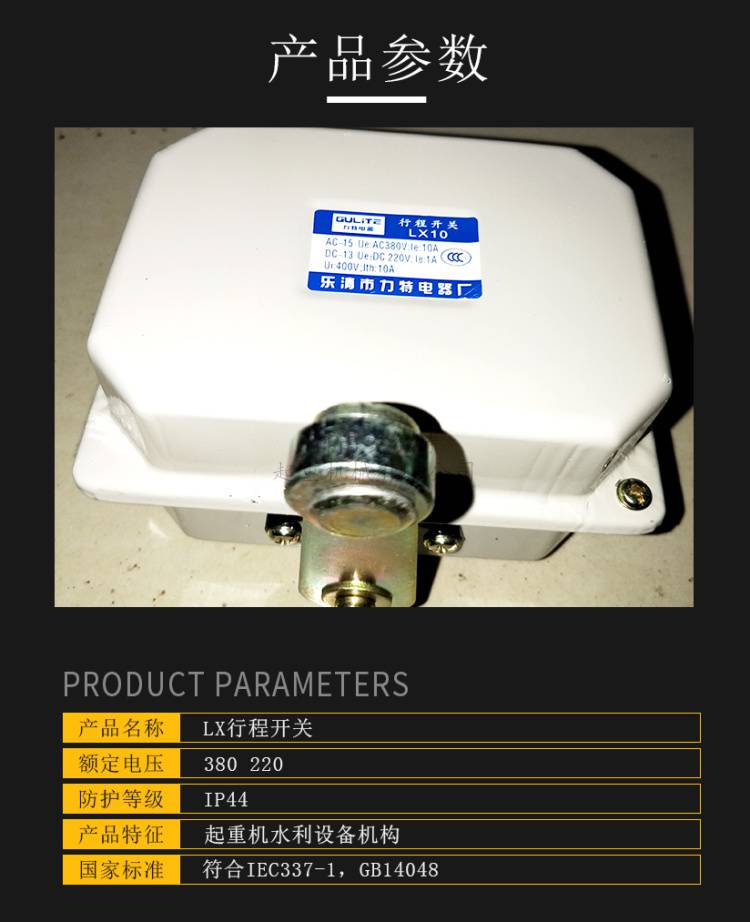



主要技術數(shù)據(jù)及型號表
|
LX10-11、12、12B |
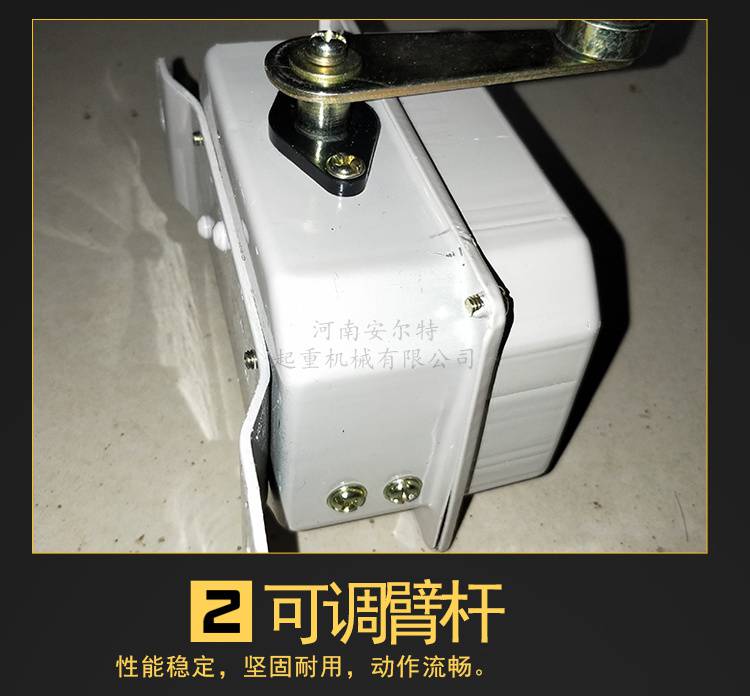
采用尺桿操作,用于慣性行程較大的平移機構 |
|
LX10-21、22 |
帶有滾子的叉型操動臂,用于慣性行程較大的平移機構 |
|
LX10-31、32 |
帶有平衡重錘的荷重杠杵狀的操作動臂,用于限制提升機構的行程 |
|
LX10-41、42 |
帶有叉型操動臂,用于三個操作位置的平移機構 |
|
LX10-51、52 |
帶有荷重杠杵狀的操作動臂,用于速度不大的平移機構 |
|
LX10-61、62 |
在外殼的兩側各有一個帶滾子的操動臂,用于速度較大的平移機構 |
|
LX10-11S、12S |
采用尺桿操動臂,用于慣性行程較大的平移機構 |
|
LX10-21S、22S |
帶有滾子的叉型操動臂,用于慣性行程較大的平移機構 |
|
LX10-31S、32S |
帶有平衡重錘的荷重杠杵狀的操作動臂,用于限制提升機構的行程 |
|
LX10-41S、42S |
帶有叉型操動臂,用于三個操作位置的平移機構 |
|
LX10-51S、52S |
帶有荷重杠杵狀的操作動臂,用于速度不大的平移機構 |
|
LX10-61S、62S |
在外殼的兩側各有一個帶滾子的操動臂,用于速度較大的平移機構 |




網站")







